Lei da gravitação universal
| Mecânica clássica |
|---|
 Diagramas de movimento orbital de um satélite ao redor da Terra, mostrando a velocidade e aceleração. |
Cinemática
|
Dinâmica
|
História
|
Trabalho e Mecânica
|
Sistema de partículas
|
Colisões
|
Movimento rotacional
|
Sistemas Clássicos
|
Formulações
|
Gravitação
|
Físicos
|
A lei da gravitação universal afirma que, se dois corpos possuem massa, ambos sofreram uma força de atração mútua proporcional às suas massas e inversamente proporcional ao quadrado da distância que separa seus centros de gravidade.[1] Essa lei foi formulada pelo físico inglês Isaac Newton em sua obra Philosophiae Naturalis Principia Mathematica, publicada em 1687, que descreve a lei da gravitação universal e as Leis de Newton — as três leis dos corpos em movimento que assentaram-se como fundamento da mecânica clássica.[2]
A gravidade é uma força fundamental de atração que age entre todos os objetos por causa de suas massas, isto é, a quantidade de matéria de que são constituídos. A gravidade mantém os objetos celestes unidos e ligados, como os gases quentes contidos pelo Sol e os planetas, confinados às suas órbitas. A gravidade da Lua causa as marés oceânicas na Terra. Por causa da gravitação, os objetos sobre a Terra são atraídos para seu centro.
Índice
1 História
2 Corpos de simetria esférica e a gravitação
3 Formulação da Lei da Gravitação Universal
4 Problema de Kepler
4.1 Sistema polar de coordenadas
4.2 Resolução da segunda lei de Newton
5 Referências
6 Ver também
História |

Sir Isaac Newton, o primeiro a formular a lei da gravitação universal
Ainda que os efeitos da gravidade sejam fáceis de notar, a busca de uma explicação para a força gravitacional tem embaraçado o homem durante séculos. O filósofo grego Aristóteles empreendeu uma das primeiras tentativas de explicar como e por que os objetos caem em direção à Terra. Entre suas conclusões, estava a ideia de que os objetos pesados caem mais rápido que os leves. Embora alguns tenham se oposto a essa concepção, ela foi comumente aceita até o fim do século XVII, quando as descobertas do cientista italiano Galileu Galilei ganharam aceitação. De acordo com Galileu, todos os objetos caíam com a mesma aceleração, a menos que a resistência do ar ou alguma outra força os freasse.
Os antigos astrônomos gregos estudaram os movimentos dos planetas e da Lua. Entretanto, o paradigma aceito hoje foi determinado por Isaac Newton, físico e matemático inglês, baseado em estudos e descobertas feitas pelos físicos que até então trilhavam o caminho da gravitação. Como Newton mesmo disse, ele chegou a suas conclusões porque estava "apoiado em ombros de gigantes". No início do século XVII, Newton baseou sua explicação em cuidadosas observações dos movimentos planetários, feitas por Tycho Brahe e por Johannes Kepler. Newton estudou o mecanismo que fazia com que a Lua girasse em torno da Terra. Estudando os princípios elaborados por Galileu Galilei e por Johannes Kepler, conseguiu elaborar uma teoria que dizia que todos os corpos que possuíam massa sofreriam atração entre si.
A partir das leis de Kepler, Newton mostrou que tipos de forças devem ser necessárias para manter os planetas em suas órbitas. Ele calculou como a força deveria ser na superfície da Terra. Essa força provou ser a mesma que da à massa sua aceleração.
Diz uma lenda que, quando tinha 23 anos, Newton viu uma maçã cair de uma árvore e compreendeu que a mesma força que a fazia cair mantinha a Lua em sua órbita em torno da Terra.
Corpos de simetria esférica e a gravitação |
As partículas dos corpos que possuem uma distribuição de massa simetricamente esférica, como estrelas, luas e planetas, tendem a se aproximar do centro de massa. Assim, um acumulado de poeira cósmica ao aglutinar-se, as partículas começam a se aproximar de forma uniforme, pois quanto mais acumuladas, mais força têm para comprimi-las. Por isso os corpos geralmente assumem uma forma esférica, visto que, quando sua massa é pequena esse efeito é bastante baixo e os corpos podem ter alterações em seus formatos.[3]
Formulação da Lei da Gravitação Universal |
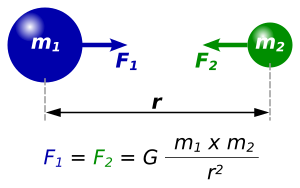
Dois corpos puntiformes m1 e m2 atraem-se exercendo entre si forças de mesma intensidade F1 e F2, proporcionais ao produto das duas massas e inversamente proporcionais ao quadrado da distância (r) entre elas. G é a constante gravitacional.
A lei da gravitação universal diz que duas partículas quaisquer do Universo se atraem gravitacionalmente por meio de uma força que é diretamente proporcional ao produto de suas massas e inversamente proporcional ao quadrado da distância que as separa.
Se os corpos não são de partículas ou não podem ser considerados como pontos materiais, a distância estabelecida entre elas deve ser medida em relação ao centro de massa delas, ou seja pontos onde pode-se supor que está concentrada toda a massa do corpo ou o sistema de corpos.
F→1=−F→2=||F→||r→‖r→‖=Gm1m2r2r→‖r→‖=Gm1m2r3r→{displaystyle {vec {F}}_{1}=-{vec {F}}_{2}=||{vec {F}}||{frac {vec {r}}{|{vec {r}}|}}=G{frac {m_{1}m_{2}}{r^{2}}}{frac {vec {r}}{|{vec {r}}|}}=G{frac {m_{1}m_{2}}{r^{3}}}{vec {r}}}

onde
F1 (F2) é a força, sentida pelo corpo 1 (2) devido ao corpo 2 (1), medida em newtons;
G=6,67×10−11Nm2/kg2{displaystyle G=6,67times 10^{-11}{text{Nm}}^{2}/{text{kg}}^{2}}é constante gravitacional universal, que determina a intensidade da força,
m 1 e m2 são as massas dos corpos que se atraem entre si, medidas em quilogramas; e
r é a distância entre os dois corpos, medida em metros;
r^{displaystyle {hat {r}}}o versor do vetor que liga o corpo 1 ao corpo 2.
A constante gravitacional universal foi medida anos mais tarde por Henry Cavendish.
A descoberta da lei da gravitação universal se deu em 1685 como resultado de uma série de estudos e trabalhos iniciados muito antes.
O estabelecimento de uma lei de gravitação, que unifica todos os fenômenos terrestres e celestes de atração entre os corpos, teve enorme importância para a evolução da ciência moderna.
Problema de Kepler |
O problema de Kepler é um caso especial do problema dos dois corpos, em que os dois corpos interagem por uma força central que varia proporcionalmente ao inverso do quadrado da distância.[carece de fontes] Esse problema resume-se a usar a segunda lei de Newton para escrever as equações de movimento do sistema, descobrindo sua trajetória no espaço. Isto é:
- F→=−GMmr2r^{displaystyle {vec {F}}=-{frac {GMm}{r^{2}}}{hat {r}}}

Sistema polar de coordenadas |
Um sistema de coordenadas adequado para resolver o problema é o sistema de coordenadas polares, de coordenadas r{displaystyle r}



- x=rcosθ{displaystyle x=rcos theta }

- y=rsinθ{displaystyle y=rsin theta }

Para resolver o problema, é necessário saber como a aceleração a→{displaystyle {vec {a}}}



- r→=rr^{displaystyle {vec {r}}=r{hat {r}}}

Derivando a expressão, pela regra do produto:
- r→˙=r˙r^+rr^˙{displaystyle {dot {vec {r}}}={dot {r}}{hat {r}}+r{dot {hat {r}}}}

Para encontrar r^˙{displaystyle {dot {hat {r}}}}
- r^=(cosθ)x^+(sinθ)y^{displaystyle {hat {r}}=(cos theta ){hat {x}}+(sin theta ){hat {y}}}

- θ^=(−sinθ)x^+(cosθ)y^{displaystyle {hat {theta }}=(-sin theta ){hat {x}}+(cos theta ){hat {y}}}

Daí se conclui que r^˙=θ˙θ^{displaystyle {dot {hat {r}}}={dot {theta }}{hat {theta }}}
- r→˙=r˙r^+rθ˙θ^{displaystyle {dot {vec {r}}}={dot {r}}{hat {r}}+r{dot {theta }}{hat {theta }}}

Derivando mais uma vez e usando a relação θ^˙=−θ˙r^{displaystyle {dot {hat {theta }}}=-{dot {theta }}{hat {r}}}
- r→¨=(r¨−rθ˙2)r^+(rθ¨+2r˙θ˙)θ^{displaystyle {ddot {vec {r}}}=({ddot {r}}-r{dot {theta }}^{2}){hat {r}}+(r{ddot {theta }}+2{dot {r}}{dot {theta }}){hat {theta }}}

Resolução da segunda lei de Newton |
Pela segunda lei de Newton:
- F→=ma→=−GMmr2r^{displaystyle {vec {F}}=m{vec {a}}=-{frac {GMm}{r^{2}}}{hat {r}}}

Cancelando a massa m{displaystyle m}

- (r¨−rθ˙2)r^+(rθ¨+2r˙θ˙)θ^=(−GMr2)r^{displaystyle ({ddot {r}}-r{dot {theta }}^{2}){hat {r}}+(r{ddot {theta }}+2{dot {r}}{dot {theta }}){hat {theta }}=left(-{frac {GM}{r^{2}}}right){hat {r}}}

Originando duas equações escalares de movimento:[6]
r¨−rθ˙2=−GMr2{displaystyle {ddot {r}}-r{dot {theta }}^{2}=-{frac {GM}{r^{2}}}}(1){displaystyle (1)}
rθ¨+2r˙θ˙=0{displaystyle r{ddot {theta }}+2{dot {r}}{dot {theta }}=0}(2){displaystyle (2)}
Multiplicando (2){displaystyle (2)}


- mr2θ¨+2mrr˙θ˙=ddt(mr2θ˙)=dLdt=0{displaystyle mr^{2}{ddot {theta }}+2mr{dot {r}}{dot {theta }}={frac {d}{dt}}(mr^{2}{dot {theta }})={frac {dL}{dt}}=0}
- L=mr2θ˙{displaystyle L=mr^{2}{dot {theta }}}


Eliminando θ˙{displaystyle {dot {theta }}}


- r¨−L2m2r3=−GMr2{displaystyle {ddot {r}}-{frac {L^{2}}{m^{2}r^{3}}}=-{frac {GM}{r^{2}}}}

Tal equação diferencial de r{displaystyle r}
- r¨=d2rdt2=ddt(drdt)=dθdtddθ(dθdtdrdθ)=Lmr2ddθ(Lmr2drdθ)=Lmr2[drdθddr(Lmr2)drdθ+(Lmr2d2rdθ2)]{displaystyle {ddot {r}}={frac {d^{2}r}{dt^{2}}}={frac {d}{dt}}left({frac {dr}{dt}}right)={frac {dtheta }{dt}}{frac {d}{dtheta }}left({frac {dtheta }{dt}}{frac {dr}{dtheta }}right)={frac {L}{mr^{2}}}{frac {d}{dtheta }}left({frac {L}{mr^{2}}}{frac {dr}{dtheta }}right)={frac {L}{mr^{2}}}left[{frac {dr}{dtheta }}{frac {d}{dr}}left({frac {L}{mr^{2}}}right){frac {dr}{dtheta }}+left({frac {L}{mr^{2}}}{frac {d^{2}r}{dtheta ^{2}}}right)right]}
![{displaystyle {ddot {r}}={frac {d^{2}r}{dt^{2}}}={frac {d}{dt}}left({frac {dr}{dt}}right)={frac {dtheta }{dt}}{frac {d}{dtheta }}left({frac {dtheta }{dt}}{frac {dr}{dtheta }}right)={frac {L}{mr^{2}}}{frac {d}{dtheta }}left({frac {L}{mr^{2}}}{frac {dr}{dtheta }}right)={frac {L}{mr^{2}}}left[{frac {dr}{dtheta }}{frac {d}{dr}}left({frac {L}{mr^{2}}}right){frac {dr}{dtheta }}+left({frac {L}{mr^{2}}}{frac {d^{2}r}{dtheta ^{2}}}right)right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e9d9c3ba62e60ea2aa0ed2a2bd1127bc76a57f1f)
- r¨=L2m2r4d2rdθ2−2L2m2r5(drdθ)2{displaystyle {ddot {r}}={frac {L^{2}}{m^{2}r^{4}}}{frac {d^{2}r}{dtheta ^{2}}}-{frac {{2}L^{2}}{m^{2}r^{5}}}left({frac {dr}{dtheta }}right)^{2}}

Resulta, então a seguinte equação para a função r(θ){displaystyle r(theta )}
L2m2r4d2rdθ2−2L2m2r5(drdθ)2−L2m2r3=−GMr2{displaystyle {frac {L^{2}}{m^{2}r^{4}}}{frac {d^{2}r}{dtheta ^{2}}}-{frac {{2}L^{2}}{m^{2}r^{5}}}left({frac {dr}{dtheta }}right)^{2}-{frac {L^{2}}{m^{2}r^{3}}}=-{frac {GM}{r^{2}}}}(3){displaystyle (3)}
Para resolver (3){displaystyle (3)}

- dudθ=−1r2drdθ{displaystyle {frac {du}{dtheta }}={frac {-1}{r^{2}}}{frac {dr}{dtheta }}}

- d2udθ2=2r3(drdθ)2−1r2d2rdθ2{displaystyle {frac {d^{2}u}{dtheta ^{2}}}={frac {2}{r^{3}}}left({frac {dr}{dtheta }}right)^{2}-{frac {1}{r^{2}}}{frac {d^{2}r}{dtheta ^{2}}}}

Substituindo essas novas relações em (3){displaystyle (3)}
- −L2m2r2[2r3(drdθ)2−1r2d2rdθ2+1r]=−GMr2{displaystyle -{frac {L^{2}}{m^{2}r^{2}}}left[{frac {2}{r^{3}}}left({frac {dr}{dtheta }}right)^{2}-{frac {1}{r^{2}}}{frac {d^{2}r}{dtheta ^{2}}}+{frac {1}{r}}right]=-{frac {GM}{r^{2}}}}
![{displaystyle -{frac {L^{2}}{m^{2}r^{2}}}left[{frac {2}{r^{3}}}left({frac {dr}{dtheta }}right)^{2}-{frac {1}{r^{2}}}{frac {d^{2}r}{dtheta ^{2}}}+{frac {1}{r}}right]=-{frac {GM}{r^{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/abad62b040fa8e68895fa3e3e0fae456395faaf0)
- −L2m2r2(d2udθ2+u)=−GMr2{displaystyle -{frac {L^{2}}{m^{2}r^{2}}}left({frac {d^{2}u}{dtheta ^{2}}}+uright)=-{frac {GM}{r^{2}}}}

Resultando, finalmente, na equação do oscilador harmônico:
- d2udθ2+u=GMm2L2{displaystyle {frac {d^{2}u}{dtheta ^{2}}}+u={frac {GMm^{2}}{L^{2}}}}

Cuja solução geral pode ser escrita como:[6]
- u(θ)=GMm2L2+Acos(θ−δ){displaystyle u(theta )={frac {GMm^{2}}{L^{2}}}+Acos left(theta -delta right)}

Em que A{displaystyle A}



- r(θ)=L2GMm211+ϵcos(θ−δ){displaystyle r(theta )={frac {L^{2}}{GMm^{2}}}{frac {1}{1+epsilon cos left(theta -delta right)}}}

Referências
↑ «Gravitação Universal». Só Física
↑ Silva, Lucas Henrique dos Santos. «Lei da Gravitação Universal». InfoEscola
↑ Young, Hugh, Freedman, Roger A (2008). Física II: Termodinâmica e Ondas. São Paulo: Pearson. p. 2. ISBN 978-85-88639-33-1
↑ Nascimento, Mauri C. «Coordenadas Polares» (PDF)
↑ ab Martins, Jorge Sá. «Os vetores velocidade e aceleração em coordenadas polares bidimensionais». Youtube
↑ abcde «Deriving Kepler's Laws». Brilliant
Ver também |
- Isaac Newton
- Leis de Newton
- Johannes Kepler
- Leis de Kepler
- Tycho Brahe
- Galileu Galilei
- Gravidade


