Zentrifugalkraft
Die Zentrifugalkraft (von lateinisch centrum, Mitte und fugere, fliehen), auch Fliehkraft, ist eine Trägheitskraft, die bei Dreh- und Kreisbewegungen auftritt und radial von der Rotationsachse nach außen gerichtet ist. Sie wird durch die Trägheit des Körpers verursacht. Die Auswirkungen der Zentrifugalkraft sind im Alltag vielfach erlebbar, beispielsweise wenn beim Kettenkarussell die Sitze nach außen gedrängt werden, in der Salatschleuder das Wasser nach außen geschleudert wird oder sich ein Zweiradfahrer „in die Kurve legen“ muss.
In der klassischen Mechanik bezeichnet Zentrifugalkraft …
- … den Widerstand, den der Körper nach dem Trägheitsprinzip der Änderung seiner Bewegungsrichtung entgegensetzt, wenn er einer gekrümmten Bahn folgt. Die Zentrifugalkraft ist stets entgegengesetzt gleich zu der Zentripetalkraft, die diese Änderung der Bewegungsrichtung verursacht. Als d’Alembertsche Trägheitskraft steht die Zentrifugalkraft mit der Zentripetalkraft im dynamischen Gleichgewicht.[1][2]
- … eine Kraft, die immer dann berücksichtigt werden muss, wenn man die Bewegung eines Körpers bezüglich eines rotierenden Bezugssystems beschreibt.[3] Diese Trägheitskraft tritt auch bei Abwesenheit einer Zentripetalkraft auf, jedoch nie in einem Inertialsystem. Die Zentrifugalkraft ergibt sich aus der Zentrifugalbeschleunigung durch Multiplikation mit der Masse.
Die Zentrifugalkraft ergibt sich nach beiden Begriffsbildungen in gleicher Größe und Richtung. Die Zentrifugalkraft ist eine Scheinkraft und genügt daher nicht dem Prinzip von Actio und Reactio.
Inhaltsverzeichnis
1 Geschichte
2 Trägheitswiderstand
2.1 Formeln
2.2 Zentripetalkraft bei Kurvenfahrt
2.2.1 Zahlenbeispiel
2.3 D’Alembertsche Trägheitskraft
2.4 Zentrifugalpotential
3 Bezugssystemabhängige Scheinkräfte
3.1 Allgemein beschleunigtes Bezugssystem
3.1.1 Herleitung
3.2 Rotierendes Bezugssystem
3.2.1 Flugbahn
4 Praktische Beispiele
4.1 Rotierende Flüssigkeit
4.2 Schleudern von Wäsche
4.3 Achterbahn
4.4 Technische Anwendungen
4.5 Zentrifugalkraft als Ersatz für die Schwerkraft
5 Weblinks
6 Einzelnachweise
Geschichte |

Die Passagiere eines rotierenden Kettenkarussells schwingen durch die Zentrifugalkraft nach außen.
Eine qualitative Beschreibung der Zentrifugalkraft findet sich bereits in den 1644 erschienenen Prinzipien der Philosophie von René Descartes.[4] Quantitativ wurde sie erstmals 1669 in einem Brief von Christian Huygens an den Sekretär der Royal Society Henry Oldenbourg abgeleitet, auch in dessen Horologium Oscillatorium von 1673 ohne Ableitung erwähnt und ausführlich in dessen nachgelassener Schrift von 1703 De Vis Centrifuga (aus dem Jahr 1659). Isaac Newton beschrieb die Zentrifugalkraft erst nach Huygens, aber unabhängig von diesem.[5]

Zentrifugalkraft bei einer Kreisbewegung
Die sich durch die Zentrifugalkraft ausbildende Form der Flüssigkeitsoberfläche in einem rotierenden, offenen Wassereimer wurde von Isaac Newton als Nachweis der Existenz eines absoluten Raumes gedeutet.
Trägheitswiderstand |
Formeln |

Bei einem Spielplatzkarussell mit geringer Eigenmasse erhöhen sich Drehzahl und Zentrifugalkraft, wenn man sich von außen nach innen bewegt.

Ein schweres, mechanisch angetriebenes Karussell verändert seine Drehzahl demgegenüber kaum, wenn man sich zur Mitte hin bewegt. Die Zentrifugalkraft nimmt daher dabei ab.
Für eine Kreisbahn ist die Zentrifugalkraft FZf{displaystyle F_{text{Zf}}}



- FZf=mω2r{displaystyle F_{text{Zf}}=m,omega ^{2},r}

Die Bahngeschwindigkeit v{displaystyle v}
ω=v/r{displaystyle omega =v/r}.
Daher kann die Zentrifugalkraft auch in Abhängigkeit von der Bahngeschwindigkeit angegeben werden:
- FZf=mv2r{displaystyle F_{text{Zf}}=m,{frac {v^{2}}{r}}}

Die Formeln zeigen, warum es schwieriger für eine Person wird, sich auf einer frei rotierenden Scheibe aufzuhalten, wenn sie sich zum Mittelpunkt der Scheibe hin bewegt. Die Massenträgheit ist bestrebt, die Bahngeschwindigkeit der Person beizubehalten, während sie sich der Rotationsachse der Scheibe nähert. Dadurch beschleunigt sich die Rotation der Scheibe, ihre Winkelgeschwindigkeit steigt (vergleiche Coriolis-Effekt). Als Resultat erhöht sich die Zentrifugalkraft proportional zur Verringerung des Radius.
Im Gegensatz dazu verringern sich bei einem großen Karussell mit gleichbleibender Drehzahl Bahngeschwindigkeit und Zentrifugalkraft, wenn man sich zur Mitte hin bewegt, proportional zum Radius.
Der Betrag der Zentrifugalbeschleunigung aZf{displaystyle a_{text{Zf}}}
- aZf=ω2r{displaystyle a_{text{Zf}}=omega ^{2},r}

und
aZf=v2r{displaystyle a_{text{Zf}}={frac {v^{2}}{r}}}.
Diese Gleichungen gelten ganz allgemein, wenn ein Körper eine Bahn durchläuft. Dabei ist der Krümmungsradius r{displaystyle r}
Die Zentripetalkraft ist gleich stark wie die Zentrifugalkraft und ist ihr exakt entgegen gerichtet:
FZf=FZp{displaystyle F_{Zf}=F_{Zp}}, vektoriell: F→Zf=−F→Zp{displaystyle {vec {F}}_{Zf}=-{vec {F}}_{Zp}}

Zur Berechnung der Zentripetalkraft werden daher die genau gleichen Formeln wie zur Berechnung der Stärke der Zentrifugalkraft eingesetzt. Allerdings ist die weit verbreite Vorstellung falsch, man würde deshalb aus der Kurve „getragen“, weil die Zentrifugalkraft größer sei als die Zentripetalkraft. Vielmehr geschieht dies, wenn die zur Änderung der Bewegungsrichtung (Kreisbahn) einwirkende äußere Kraft nicht ausreicht, die erwartete Änderung herbeizuführen. Beispiel: die Haftreibung der Autoreifen reicht nicht aus, um diejenige Zentripetalkraft von der Fahrbahn auf das Fahrzeug zu übertragen, die bei der gegebenen Geschwindigkeit dem Einschlag des Lenkrads und dem so gewählten Kurvenradius entspricht.
Nur durch die Einführung eines speziellen rotierenden Bezugsystems lässt sich die Zentrifugalkraft von der Zentripetalkraft entkoppeln.
Zentripetalkraft bei Kurvenfahrt |

Kurvenabschnitt (Länge L, gestrichelt), Änderung der Geschwindigkeit Δv→{displaystyle Delta {vec {v}}}
 , Krümmungsradius r{displaystyle r}
, Krümmungsradius r{displaystyle r}Ein Körper mit der Masse m{displaystyle m}
Der Betrag v{displaystyle v}


F=mΔvΔt{displaystyle F=m,{frac {Delta v}{Delta t}}}(2. Newtonsches Gesetz oder Grundgesetz der Mechanik).
Während der Zeit Δt{displaystyle Delta t}






- FZp=mv2r{displaystyle F_{Zp}=m{frac {v^{2}}{r}}}

Die Kreisfahrt kann auch als Rotation um den Krümmungsmittelpunkt mit der Winkelgeschwindigkeit ω{displaystyle omega }
- FZp=mω2r{displaystyle F_{Zp}=m,omega ^{2},r}

Zahlenbeispiel |
Ein Autofahrer mit der Masse von 70 kg (mg≈{displaystyle mmathrm {g} approx }
Die Zentripetalkraft ist dann
- FZp=70kg(15m/s)275m=70kg⋅3m/s2=210N.{displaystyle F_{Zp}=70;mathrm {kg} {frac {({15;mathrm {m/s} )}^{2}}{75;mathrm {m} }}=70;mathrm {kg} cdot 3;mathrm {m/s^{2}} =210,mathrm {N} .}

Die Zentripetalkraft wirkt von links auf den Fahrer ein und zwingt ihn aus seiner zunächst geradlinigen Trägheitsbewegung in die Kurvenbahn, gerade so, dass er im Auto seine Position beibehält. Die Kraft wird vom Fahrersitz auf den Fahrer ausgeübt und er spürt sie dadurch, dass er seitlich in den Sitz gedrückt wird.
D’Alembertsche Trägheitskraft |
Beschreibt der Schwerpunkt eines Körpers mit der Masse m{displaystyle m}

- F→Zp=ma→Zp{displaystyle {vec {F}}_{text{Zp}}=m{vec {a}}_{text{Zp}}}

Diese Grundgleichung der Mechanik kann auf die Form
- F→Zp−ma→Zp=0→{displaystyle {vec {F}}_{text{Zp}}-m{vec {a}}_{text{Zp}}={vec {0}}}

gebracht werden.
Das negative Produkt aus Masse und Zentripetalbeschleunigung wird formal als Kraft aufgefasst[7] und als Zentrifugalkraft FZf{displaystyle F_{text{Zf}}}
- F→Zp+F→Zf=0→{displaystyle {vec {F}}_{text{Zp}}+{vec {F}}_{text{Zf}}={vec {0}}}

Im Sinne des dynamischen Gleichgewichts ist die Zentrifugalkraft stets entgegengesetzt gleich groß wie die Zentripetalkraft.[9][10] Die Summe der Kräfte ist somit null, wenn man die (d’Alembertsche) Trägheitskraft mit einschließt.
Daraus ergibt sich die Definition der Zentrifugalkraft als Trägheitswiderstand in Bezug auf die Zentripetalkraft:
- F→Zf=−F→Zp{displaystyle {vec {F}}_{text{Zf}}=-{vec {F}}_{text{Zp}}}

Der Trägheitswiderstand quantifiziert eine Eigenschaft der Trägheit, die sich dadurch äußern soll, dass ein Körper sich durch eine Trägheitskraft („vis inertiae“) jeder Änderung einer bestehenden Bewegung widersetzt.
Die Zentrifugalkraft im d’Alembertschen Sinn ist immer an die Zentripetalkraft gekoppelt, gewissermaßen deren Spiegelbild. Sie wird daher in manchen Texten als „Gegenkraft“ oder „Reaktionskraft“ zur Zentripetalkraft beschrieben;[1][2] dabei wird ein Bezug zum dritten newtonschen Gesetz nahegelegt. Andere Autoren wenden jedoch ein, dass diese Kraft nicht mit den in rotierenden Bezugssystemen auftretenden Trägheits- bzw. Scheinkräften verwechselt werden darf und verweisen auf einen Widerspruch zum dritten newtonschen Gesetz, da Zentripetalkraft und Zentrifugalkraft am selben Körper angreifen, dagegen müssen Kräftepaare, die als „Actio und Reactio“ bezeichnet werden, an verschiedenen Körpern angreifen.[11]
Im Unterschied dazu ist diejenige Zentrifugalkraft, die nur dann berücksichtigt werden muss, wenn man die newtonsche Bewegungsgleichung in einem beschleunigten und rotierenden Bezugssystem formuliert[8] von der Zentripetalkraft unabhängig.
Zentrifugalpotential |
Da die Zentrifugalkraft, genau wie die Gravitationskraft FG=mg,{displaystyle F_{mathrm {G} }=mg,}

- ΦZ=ω2r22=v22{displaystyle Phi _{mathrm {Z} }={frac {omega ^{2}r^{2}}{2}}={frac {v^{2}}{2}}}

Denn ωr=v{displaystyle omega r=v}
Die Energie im Zentrifugalpotential ist gleich der kinetischen Energie:
- EZ=mω2r22=mv22{displaystyle E_{mathrm {Z} }={frac {momega ^{2}r^{2}}{2}}={frac {mv^{2}}{2}}}

Mit einem anderen Zentralpotential (z. B. Gravitation, Coulomb-Kraft) kann das Zentrifugalpotential zum effektiven Potential zusammengefasst werden.
Bezugssystemabhängige Scheinkräfte |
Allgemein beschleunigtes Bezugssystem |

Die Funken eines Winkelschleifers fliegen geradlinig. Für einen Beobachter, der sich auf der Scheibe befindet und mit ihr rotiert, würden die Funken einer schneckenförmigen Bahn folgen, wie im unteren Bild dargestellt.

Ein „losgelassenes Objekt“ im rotierenden Bezugssystem beschreibt eine Kreisevolvente.
Scheinkräfte müssen immer dann berücksichtigt werden, wenn man eine Bewegungsgleichung in einem Bezugssystem aufstellt, das selbst gegenüber dem Inertialsystem beschleunigt wird. Betrachtet man z. B. die Funken, die sich von einer Schleifscheibe lösen, in einem Inertialsystem, so bewegen sich diese geradlinig, da sie kräftefrei sind. Im rotierenden Bezugssystem der Schleifscheibe wird die Relativbeschleunigung der Teilchen dagegen mit einer Scheinkraft erklärt.
Herleitung |
Um zwischen den Größen eines Objektes (Ort, Geschwindigkeit, Beschleunigung) in zwei Bezugssystemen zu unterscheiden, wird die normale Notation im Inertialsystem verwendet und das nichtinertiale Bezugssystem erhält den gleichen Buchstaben mit einem Apostroph (engl. prime).[12] Letzteres wird dann auch als „gestrichenes Bezugssystem“ bezeichnet.[13]
| Bedeutung | |
|---|---|
r→{displaystyle {vec {r}}} | Position des Objektes in S (Inertialsystem). |
r→′{displaystyle {vec {r}},'} | Relativposition des Objektes in S’ (Nicht-Inertialsystem). |
v→=r→˙{displaystyle {vec {v}}={dot {vec {r}}}} | Geschwindigkeit des Objektes in S |
v→′{displaystyle {vec {v}},'} | Relativgeschwindigkeit des Objektes in S’ |
a→=v→˙{displaystyle {vec {a}}={dot {vec {v}}}} | Beschleunigung des Objektes in S |
a→′{displaystyle {vec {a}},'} | Relativbeschleunigung des Objektes in S’ |
r→B{displaystyle {vec {r}}_{B}} | Position des Ursprungs von S’ in S |
v→B=r→˙B{displaystyle {vec {v}}_{B}={dot {vec {r}}}_{B}} | Geschwindigkeit des Ursprungs von S’ in S |
a→B=v→˙B{displaystyle {vec {a}}_{B}={dot {vec {v}}}_{B}} | Beschleunigung des Ursprungs von S’ in S |
ω→{displaystyle {vec {omega }}} | Winkelgeschwindigkeit des Systems S’ in S |
α→=ω→˙{displaystyle {vec {alpha }}={dot {vec {omega }}}} | Winkelbeschleunigung des Systems S’ in S |
Das zweite newtonsche Gesetz gilt in seiner ursprünglichen Form nur im Inertialsystem. Die Impulsänderung ist in diesem Bezugssystem proportional zur äußeren Kraft F→{displaystyle {vec {F}}}
- ma→=F→{displaystyle m,{vec {a}}={vec {F}}}

Möchte man eine analoge Bewegungsgleichung in einem Bezugssystem aufstellen, das kein Inertialsystem ist, müssen Scheinkräfte berücksichtigt werden. Mit Hilfe kinematischer Beziehungen wird die Beschleunigung im Inertialsystem durch Größen ausgedrückt, die in einem beschleunigten Bezugssystem gegeben sind:[3]
- a→=dv→dt=a→B+ω→×(ω→×r→′)+ω→˙×r→′+2ω→×v→′+a→′{displaystyle {vec {a}}={frac {d{vec {v}}}{dt}}={vec {a}}_{B}+{vec {omega }}times ({vec {omega }}times {vec {r}}{;'})+{dot {vec {omega }}}times {vec {r}}{;'}+2,{vec {omega }}times {vec {v}}{;'}+{vec {a}}{;'}}

Einsetzen in die Newtonsche Bewegungsgleichung und Umstellung nach dem Term mit der Relativbeschleunigung ergibt:
- ma→′=F→−ma→B−mω→×(ω→×r→′)⏟F→zentrifugal−mω→˙×r→′⏟F→Euler−2mω→×v→′⏟F→Coriolis{displaystyle m,{vec {a}}{;'}={vec {F}}-m,{vec {a}}_{B}underbrace {-m,{vec {omega }}times ({vec {omega }}times {vec {r}}{;'})} _{{vec {F}}_{mathrm {zentrifugal} }}underbrace {-m,{dot {vec {omega }}}times {vec {r}}{;'}} _{{vec {F}}_{mathrm {Euler} }}underbrace {-2m,{vec {omega }}times {vec {v}}{;'}} _{{vec {F}}_{mathrm {Coriolis} }}}

Das Produkt aus Masse m{displaystyle m}
Der Term −mω→×(ω→×r→′){displaystyle -m,{vec {omega }}times ({vec {omega }}times {vec {r}}{;'})}

Stehen Radiusvektor und Winkelgeschwindigkeit senkrecht aufeinander, so ergibt sich mit r=|r→′|{displaystyle r=left|{vec {r}}{;'}right|}
- FZf=mω2r{displaystyle F_{text{Zf}}=momega ^{2}r}

Rotierendes Bezugssystem |
Rotationen werden häufig in einem Bezugssystem beschrieben, bei dem der Ursprung im ortsfesten oder momentanen Krümmungsmittelpunkt liegt. Der Ursprung des Bezugsystems ist nicht beschleunigt. Nimmt man an, dass als äußere Kraft nur die Zentripetalkraft wirkt, lautet die Bewegungsgleichung im rotierenden Bezugssystem:
- ma→′=F→Zp−mω→×(ω→×r→′)⏟F→zentrifugal−mω→˙×r→′⏟F→Euler−2mω→×v→′⏟F→Coriolis=F→Zp+F→Zf+F→E+F→C{displaystyle m,{vec {a}}{;'}={vec {F}}_{text{Zp}}underbrace {-m,{vec {omega }}times ({vec {omega }}times {vec {r}}{;'})} _{{vec {F}}_{mathrm {zentrifugal} }}underbrace {-m,{dot {vec {omega }}}times {vec {r}}{;'}} _{{vec {F}}_{mathrm {Euler} }}underbrace {-2m,{vec {omega }}times {vec {v}}{;'}} _{{vec {F}}_{mathrm {Coriolis} }}={vec {F}}_{text{Zp}}+{vec {F}}_{text{Zf}}+{vec {F}}_{text{E}}+{vec {F}}_{text{C}}}

Für den Spezialfall, dass ein Körper im rotierenden Bezugssystem ruht, sind Corioliskraft und die Relativbeschleunigung null. Die Eulerkraft verschwindet ebenfalls, da die Winkelbeschleunigung ebenfalls null wird.
- F→Zp+F→Zf=0→{displaystyle {vec {F}}_{text{Zp}}+{vec {F}}_{text{Zf}}={vec {0}}}
Es ergibt sich dieselbe Beziehung wie beim dynamischen Gleichgewicht. Dennoch ist das Ergebnis an unterschiedliche Voraussetzungen geknüpft. Während sich die d’Alembertsche Trägheitskraft als negatives Produkt aus Masse und Absolutbeschleunigung ergibt, wird hier ein spezielles Bezugssystem vorausgesetzt.
In diesem Bezugssystem kompensieren sich Fliehkraft und die nach innen gerichtete Zentripetalkraft. Anschaulich formuliert: Wenn ein Objekt auf einer rotierenden Scheibe „stehen bleiben“ soll, muss etwas das Objekt festhalten. Die Fliehkraft und die Zentripetalkraft addieren sich zu null, sodass der Körper „in Ruhe“, also an derselben Stelle der Scheibe bleibt.
Beschreibt man das Objekt auf einer rotierenden Scheibe dagegen in einem Inertialsystem, so möchte sich der Körper gemäß dem Trägheitsprinzip nicht auf einer Kreisbahn, sondern unter Beibehaltung seiner Geschwindigkeit geradeaus weiterbewegen; es wirkt auf ihn aber weiter dieselbe „nach innen“ gerichtete Zentripetalkraft. Diese ist im Gegensatz zur Fliehkraft keine Trägheitskraft, sondern eine in jedem Bezugssystem zu berücksichtigende äußere (reale) Kraft, die bewirkt, dass der Körper ständig nach innen beschleunigt und damit auf eine Kreisbahn gezwungen wird.

Um einen Pfosten rotierender Ball, der von einer Feder (einfaches Modell eines Fadens) gehalten wird. Kraft (1) ist die Zentrifugalkraft. Alle anderen Kräfte sind entweder die Zentripetalkraft oder deren Reactio, da sie auf einer Wirkungslinie liegen.
Beispiele:
- Wird ein Insasse zum Beispiel durch einen Sicherheitsgurt, durch Haftreibung auf dem Sitz, durch Kontaktkräfte etc. in einem Auto festgehalten, so übt das im fahrzeugfesten rotierenden Bezugssystem eine der Zentrifugalkraft entgegengesetzte, gleich große Kraft auf ihn aus. Diese Kraft dient gerade als Zentripetalkraft, um den Insassen auf derselben gekrümmten Bahn zu halten, die das Auto durchläuft. In diesem Sinne sind Zentrifugalkraft und Zentripetalkraft einander entgegengesetzte, gleich große Kräfte.
- Bei einem Astronauten, der in einem Satelliten die Erde umkreist, ist die Gravitationsbeschleunigung für die Raumkapsel und ihn gleich groß und sorgt als Zentripetalbeschleunigung dafür, dass beide die gleiche Kreisbahn um die Erde durchlaufen. Bei Beschreibung dieser Kreisbahn in einem Satellitensystem mit dem Ursprung im Erdmittelpunkt wirken zwei Kräfte auf den Astronauten: die Gravitationskraft und die Zentrifugalkraft. Dabei hebt die Zentrifugalkraft gerade die Schwerkraft auf.[14]
- Der Faden, der einen Körper auf einer Kreisbahn hält, wird durch die Reaktionskraft zur Zentripetalkraft (Kraft (3) im nebenstehenden Bild) und die Kraft (4) (Zentripetalkraft) gespannt. Dies kann z. B. auch mit einer Federwaage unabhängig vom Bezugssystem gemessen werden. Nur im Spezialfall eines mit dem betrachteten Körper mitrotierenden Bezugssystems sind die Reaktion der Zentripetalkraft (3) und die Zentrifugalkraft (1) in Betrag und Richtung gleich, sonst jedoch nicht. Ihre Angriffspunkte sind dagegen immer verschieden.
- In dieser Sichtweise übt die Feder eine Zentripetalkraft auf den Ball aus, sodass dieser auf eine Kreisbahn gezwungen wird, und umgekehrt zieht auch der Ball an der Feder.
- Überträgt man nebenstehendes Bild auf einen Menschen, der um einen Pfosten rotiert (die Feder symbolisiert den Arm, der Ball den Körper), so entspricht es der Alltagssprache, dass man eine nach außen ziehende Fliehkraft spürt und man diese durch das Festhalten an dem Pfosten ausgleichen muss. Wenn man die Kräfte (1) und (3) nicht unterscheidet und mögliche Widersprüche zum Wechselwirkungsprinzip ignoriert, ist eine solche Aussage auch möglich. Das Gefühl, nach außen gezogen zu werden, ist allerdings nicht Resultat der „wirkenden Fliehkraft“ – die Dehnung im Arm wird durch die Zentripetalkraft (4) und deren Reactio (3) hervorgerufen und erweist sich damit als unabhängig vom Bezugssystem.
Fehlt die äußere Kraft (z. B. bei den Funken, die sich ablösen), so unterscheiden sich die Definitionen:
- ma→′=−mω→×(ω→×r→′)⏟F→zentrifugal−mω→˙×r→′⏟F→Euler−2mω→×v→′⏟F→Coriolis{displaystyle m,{vec {a}}{;'}=underbrace {-m,{vec {omega }}times ({vec {omega }}times {vec {r}}{;'})} _{{vec {F}}_{mathrm {zentrifugal} }}underbrace {-m,{dot {vec {omega }}}times {vec {r}}{;'}} _{{vec {F}}_{mathrm {Euler} }}underbrace {-2m,{vec {omega }}times {vec {v}}{;'}} _{{vec {F}}_{mathrm {Coriolis} }}}

Die Zentrifugalkraft ist nach dieser Definition an das Bezugssystem gekoppelt, aber unabhängig davon, ob eine äußere Kraft vorhanden ist oder nicht. Die Relativbewegung kann in diesem Fall aber nur durch eine Kombination mehrerer Scheinkräfte interpretiert werden, von denen z. B. auch die Corioliskraft eine radiale Richtung haben kann.
Beispiel:
Liegt auf dem Beifahrersitz ein Apfel, so sieht der Fahrer in jeder Kurve, wie der Apfel im Auto zur Seite beschleunigt wird. Hier wird die Beschleunigung des Apfels mit einer Scheinkraft erklärt, der keine gleich große Zentripetalkraft entgegensteht.
Flugbahn |
Wenn bei einem Körper auf einer Kreisbahn schlagartig die Zentripetalkraft wegfällt, so beschreibt er im mitrotierenden Bezugssystem eine Kreisevolvente als Flugbahn, während er im nicht rotierenden Bezugssystem geradlinig in Richtung der Tangente weiterfliegt. Die Kreisevolvente zeigt nur in ihrem ersten Teilstück genau von der Rotationsachse weg.
Praktische Beispiele |
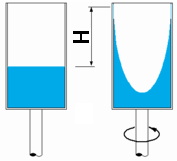
Wasseroberfläche in einem rotierenden Gefäß

Rühren in einem Wasserglas
Rotierende Flüssigkeit |
Bei einem mit Wasser gefüllten zylinderförmigen Gefäß, das um seine senkrechte Achse rotiert, nimmt die Wasseroberfläche eine gekrümmte Form an, wobei der Wasserstand außen höher ist als in der Mitte. Die Wasserteilchen werden durch eine Zentripetalkraft auf eine Kreisbahn gezwungen. Im stationären Zustand muss die Vektorsumme von Zentrifugalkraft und Gewichtskraft an jedem Punkt der Oberfläche auf dieser senkrecht stehen. Bezeichnet g{displaystyle g}
- tanα=ω2rg{displaystyle tan {alpha }={frac {{omega }^{2};r}{g}}}

Der Tangens des Winkels ist die Steigung der Wasseroberfläche:
- dzdr=tanα{displaystyle {frac {dz}{dr}}=tan {alpha }}

Da die Zentrifugalkraft proportional zum Abstand von der Achse ist, hat die Oberfläche die Form eines Rotationsparaboloides und deren Querschnitt durch Integration die Gleichung:[15]
- z=ω22gr2+z0{displaystyle z={frac {{omega }^{2}}{2;g}};r^{2}+z_{0}}

Die Höhe der Flüssigkeitsoberfläche an einem beliebigen Punkt, gemessen an der Höhe ihres tiefsten Punktes, entspricht also der Größe des Zentrifugalpotentials an diesem Punkt.
Aus der Volumenkonstanz ergibt sich für den Anstieg des Wasserstands am Rand des Glases:
- H=ω24gR2{displaystyle H={frac {{omega }^{2}}{4;g}};R^{2}}

Die parabolische Form einer Licht reflektierenden Flüssigkeitsoberfläche findet Anwendung bei den flüssigen Spiegeln astronomischer Spiegelteleskope, die im einfachsten Fall aus Quecksilber bestehen.
Schleudern von Wäsche |
Eine Waschmaschine mit einem Trommeldurchmesser von 50 cm hat im Schleudergang eine Drehzahl von 1200 Umdrehungen pro Minute. Die Zentrifugalbeschleunigung für ein mitrotierendes Wäschestück ergibt sich zu
- ω=130rads,r=0,25m,aZf=4000ms2.{displaystyle omega =130,{frac {mathrm {rad} }{mathrm {s} }},qquad r=0{,}25,mathrm {m} ,qquad a_{mathrm {Zf} }=4000,{frac {mathrm {m} }{mathrm {s} ^{2}}}.}

Hierbei ist ω{displaystyle omega }
Das Ergebnis entspricht etwa dem 400-Fachen der Erdbeschleunigung. Auf ein Kleidungsstück an der Trommelwand wirkt somit eine Zentrifugalkraft, die 400-mal so groß ist wie seine Gewichtskraft.
Achterbahn |
Die Zentrifugalkraft ist für die Konstruktion von Achterbahnen von Bedeutung, bei denen für den menschlichen Körper unangenehme Kräfte möglichst vermieden werden sollen, aber solche, die der Schwerkraft entgegenwirken und somit ein Gefühl der Schwerelosigkeit erzeugen, erwünscht sind.[16] Beispielsweise ergibt sich bei kreisförmigen Loopings, bei denen im höchsten Punkt gerade Schwerelosigkeit erzeugt wird, am Einstiegspunkt ein abrupter Anstieg der Beschleunigung um 5g{displaystyle 5g}
Technische Anwendungen |
Technische Anwendungen der Zentrifugalkraft sind die Zentrifuge, der Fliehkraftabscheider, der Schneckentrieur, das Fliehkraftpendel und der Fliehkraftregler. Bei übermäßiger Beanspruchung kann es auch zum Fliehkraftzerknall kommen.
Zentrifugalkraft als Ersatz für die Schwerkraft |

Agena-Raketenstufe am Sicherheitsband, zweiter Versuch mit Gemini 12 (1966)

Nautilus-X (NASA-Entwurf von 2011)

Rotierende radförmige Raumstation, Entwurf von Herman Potočnik (Pseudonym: Hermann Noordung, 1929)



Für künftige Raumstationen unterschiedlicher Größe hat man geplant, die Zentrifugalkraft als Ersatz für die Schwerkraft zu verwenden, weil längere Schwerelosigkeit der Gesundheit des Menschen schaden kann. Der erste Versuch, in einem bemannten Raumfahrzeug Zentrifugalkraft zu nutzen, fand 1966 statt. Dabei hat man die Gemini-11-Kapsel mit der Agena-Raketenstufe durch ein 30 Meter langes Sicherheitsband verbunden und beide Objekte mit etwa einer Umdrehung alle sechs Minuten um den gemeinsamen Schwerpunkt rotieren lassen.
Als Folge der Zentrifugalkraft zeigt in einer rotierenden Raumstation ein Lot an jedem Ort von der Rotationsachse weg nach außen. Frei „fallende“ Gegenstände entfernen sich von dieser Lotrichtung, und zwar entgegen der Rotationsrichtung der Raumstation. Diese Abweichung kann als eine Folge der Corioliskraft aufgefasst werden. Die Bahnkurve eines frei fallenden Gegenstands hat im rotierenden Bezugssystem der Raumstation die Form einer Kreisevolvente und ist von der Rotationsgeschwindigkeit der Raumstation unabhängig. Jedoch hängt der Größenmaßstab der Kreisevolvente vom Radius der anfänglichen Kreisbahn ab, d. h. von der anfänglichen Entfernung des Gegenstandes von der Rotationsachse. Von einem nicht rotierenden Bezugssystem aus gesehen bewegen sich frei „fallende“ Gegenstände mit konstanter Geschwindigkeit auf einer geraden Linie, die tangential zu ihrer vorherigen Kreisbahn liegt.
Wirft man in der Raumstation einen Gegenstand mit der ihm entsprechenden Rotationsgeschwindigkeit entgegen der Rotationsrichtung, so würde der Gegenstand von einem nichtrotierenden Bezugssystem aus gesehen stillstehen, während sich die Raumstation an ihm vorbeidreht. Im rotierenden Bezugssystem der Raumstation gesehen, vollführt der Gegenstand also eine Kreisbahn um die Drehachse und kommt, wenn es längs der Bahn keinen Reibungswiderstand gibt, nach einer Umrundung wieder am Ausgangspunkt an.
Weblinks |
Zentrifugalkraft auf Schülerniveau bei LEIFI
- Video: Coriolis- und Zentrifugalkraft im rotierenden Bezugssystem. Institut für den Wissenschaftlichen Film (IWF) 2007, zur Verfügung gestellt von der Technischen Informationsbibliothek (TIB), doi:10.3203/IWF/C-13095.
Einzelnachweise |
↑ ab
Hans J. Paus: Physik in Experimenten und Beispielen. 3., aktualisierte Auflage. Hanser, München 2007, ISBN 3-446-41142-9, S. 33–35 (eingeschränkte Vorschau in der Google-Buchsuche).
↑ ab
Bruno Assmann, Peter Selke: Kinematik und Kinetik (= Technische Mechanik. Band 3). 15., überarbeitete Auflage. Oldenbourg, München 2011, ISBN 978-3-486-59751-6, S. 252 (eingeschränkte Vorschau in der Google-Buchsuche). „Die Zentrifugalkraft ist die Reaktionskraft der Zentripetalkraft, die die gekrümmte Bahn erzwingt.“
↑ abc
Martin Mayr: Technische Mechanik: Statik, Kinematik – Kinetik – Schwingungen, Festigkeitslehre. 6. überarbeitete Auflage. Hanser, 2008, ISBN 978-3-446-41690-1 (eingeschränkte Vorschau in der Google-Buchsuche). „Bei der Bewegung auf einer gekrümmten Bahn tritt zusätzlich die Normal- oder Zentripetalbeschleunigung auf. Die zugehörige Trägheitskraft nennen wir Zentrifugalkraft.“
↑ René Descartes: Die Prinzipien der Philosophie, übersetzt von Artur Buchenau. 7. Auflage. Felix Meiner Verlag, Hamburg 1965, S. 86 ff.
↑ John Herivel: The Background of Newton’s Principia, und John Herivel: Newton’s Discovery of the law of Centrifugal Force. In: The Isis. Band 51, 1960, S. 546.
↑
Szabo: Einführung in die Technische Mechanik. Springer, 2003, ISBN 3-540-44248-0 (eingeschränkte Vorschau in der Google-Buchsuche).
↑
Dietmar Gross, Werner Hauger, Jarg Schrader, Wolfgang A. Wall: Technische Mechanik. Band 3: Kinetik. 10. Auflage. Gabler Wissenschaftsverlage, 2008, ISBN 978-3-540-68422-0, S. 191 (eingeschränkte Vorschau in der Google-Buchsuche). „Wir schreiben nun F−ma=0{displaystyle F-ma=0}und fassen das negative Produkt aus der Masse m{displaystyle m}
formal als eine Kraft auf, die wir […] D’Alembertsche Trägheitskraft FT{displaystyle F_{T}}
nennen: FT=−ma{displaystyle F_{T}=-ma}
. Diese Kraft ist keine Kraft im Newtonschen Sinne, da zu ihr keine Gegenkraft existiert (sie verletzt das Axiom actio=reactio!), wir bezeichnen sie daher als Scheinkraft.“
↑ ab
Cornelius Lanczos: The Variational Principles of Mechanics. Courier Dover Publications, New York 1986, ISBN 0-486-65067-7, S. 88–110 (eingeschränkte Vorschau in der Google-Buchsuche). S. 88: „We now define a vector I by the equation I = -m A. This vector I can be considered as a force created by the motion. We call it the “force of inertia”. With this concept the equation of Newton can be formulated as follows: F + I = 0.“
↑
Mahnken: Lehrbuch der Technischen Mechanik. Dynamik. Springer, 2012, ISBN 978-3-642-19837-3 (eingeschränkte Vorschau in der Google-Buchsuche). „Wir bemerken noch, dass die Zentrifugalkraft jeweils mit der Zentripetalkraft im Gleichgewicht ist, welche zum Mittelpunkt hin gerichtet ist.“
↑
Alfred Böge, Wolfgang Böge, Klaus-Dieter Arnd u. a.: Handbuch Maschinenbau: Grundlagen und Anwendungen der Maschinenbau-Technik Gebundene Ausgabe – 22. Auflage. Springer Verlag, 2014, ISBN 978-3-658-06597-3 (Vorschau).
↑
Ludwig Bergmann, Clemens Schaefer: Mechanik, Relativität, Wärme. Hrsg.: Thomas Dorfmüller (= Lehrbuch Der Experimentalphysik. Band 1). 11., völlig neubearbeitete Auflage. de Gruyter, Berlin 1998, ISBN 3-11-012870-5, S. 240 ff. (eingeschränkte Vorschau in der Google-Buchsuche).
↑ Notation hauptsächlich nach Karl Schilcher: Theoretische Physik kompakt für das Lehramt. S. 89.
↑
Ekbert Hering, Rolf Martin, Martin Stohrer: Physik für Ingenieure. 11. Auflage. Springer, 2012, ISBN 978-3-642-22568-0, S. 51–52 (eingeschränkte Vorschau in der Google-Buchsuche).
↑ Walter Greiner: Klassische Mechanik I. Harri Deutsch, 2007, ISBN 978-3-8171-1815-1 (eingeschränkte Vorschau in der Google-Buchsuche).
↑ Peter R. Hakenesch: Skript zur Vorlesung Fluidmechanik. S. 51 ff. (PDF; 7,19 MB).
↑ Verena Heintz, Ann-Marie Martensson-Pendrill, Anette Schmitt, Klaus Wendt: Achterbahn fahren im Physikunterricht. In: Physik in unserer Zeit. 2009, Heft 2.


