Alavanca
Na física, a alavanca é um objeto rígido que é usado com um ponto fixo apropriado (fulcro) para multiplicar a força mecânica que pode ser aplicada a um outro objeto (resistência). Isto é denominado também vantagem mecânica, e é um exemplo do princípio dos momentos. O princípio da força de alavanca pode também ser analisado usando as leis de Newton. A alavanca é uma das 6 máquinas simples.
Índice
1 História
2 Alavancas
3 A balança de dois pratos
4 As alavancas
5 Ver também
6 Referências
História |
O princípio da alavancagem foi descoberto por Arquimedes no século III a.C.,[1] estudando as máquinas "Arquimedianas": alavanca, roldana, e parafuso.[2][3]
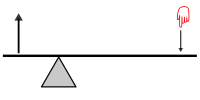
Alavancas |

Princípio do funcionamento de uma alavanca.
A força aplicada em pontos de extremidade da alavanca é proporcional à relação do comprimento do braço de alavanca medido entre o fulcro e o ponto da aplicação da força aplicada em cada extremidade da alavanca.
A equação fundamental das alavancas é:
Fp×BP=Fr×BR{displaystyle Fptimes BP=Frtimes BR}

onde:
Fp é a força que vai provocar o movimento
Fr é a força potente do centro de apoio
BP é a distância da força potente
BR é a distância da força resistente do centro de apoio
A balança de dois pratos |
A balança de dois pratos é uma alavanca interfixa, pois seu ponto fixo fica
L1×F1=L2×F2{displaystyle L1times F1=L2times F2}
Para que, em uma alavanca, ocorra equilíbrio entre os lados, o produto do braço pela força resultante deve ser igual em ambas as extremidades.
As alavancas |
- O peso P representa a resistência aplicada no ponto B, o ponto O é o ponto de apoio (fulcro) e a força representa a potência aplicada no ponto A.
- O torque da força F2{displaystyle F_{2}}
com relação ao ponto O é tal que faz girar o sistema no sentido horário e depende do módulo da força peso e da distância D2{displaystyle D_{2}}
.
- O torque da força F1{displaystyle F_{1}}
com relação ao ponto O é tal que faz girar o sistema no sentido anti-horário e depende do módulo da força peso e da distância D1{displaystyle D_{1}}
.
- Quando os dois torques forem iguais, o sistema não gira, está em equilíbrio.
∑T=0⇒F1×D1=F2×D2{displaystyle sum T=0Rightarrow F_{1}times D_{1}=F_{2}times D_{2}}

Podem ser classificadas em:
inter-fixa ou de primeira classe →{displaystyle rightarrow }onde o ponto fixo fica entre a força resistente (F1{displaystyle F_{1}}

Exemplo: Gangorra, articulação, cabeça, atlanto axial e tesoura
inter-resistente ou de segunda classe →{displaystyle rightarrow }

Exemplo: Carrinho-de-mão, quebra nozes.
interpotente ou de terceira classe →{displaystyle rightarrow }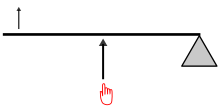

Exemplo: Pinça, cotovelo, ombro e tronco
Ver também |
- Commons
- Wikcionário
- Momento de alavanca
Referências
↑ Ostdiek, Vern; Bord, Donald (2005). Inquiry into Physics. [S.l.]: Thompson Brooks/Cole. p. 123. ISBN 0-534-49168-5. Consultado em 22 de maio de 2008 A referência emprega parâmetros obsoletos|coautor=(ajuda) (em inglês)
↑ Asimov, Isaac (1988), Understanding Physics, ISBN 0-88029-251-2, New York, New York, USA: Barnes & Noble, p. 88. (em inglês)
↑ Chiu, Y. C. (2010), An introduction to the History of Project Management, ISBN 90-5972-437-2, Delft: Eburon Academic Publishers (em inglês)


